NASAs $820 million dual Mars Exploration Rover
project -- Spirit and still en route Opportunity --
are designed to build upon a legacy of earlier
discoveries about Mars. The two specially-equipped
robots were hurled toward Mars to gain new insights
regarding the history of environments on the planet --
perhaps hospitable to life in the past or possibly
today.
Following touch down on Mars, each rover has been
built to carry out three months of exploration at their
respective landing spots.
Both Spirit and Opportunity are geared to wheel
across Mars, inspecting their surroundings with a
stereo, color camera and with an infrared instrument
that can classify rock types from a distance. Rocks that
are deemed by scientists to be the most interesting can
be subjected to a handful of tools attached to a
rovers robotic arm.
The second rover, Opportunity, is zeroing in on its
attempted Mars landing on January 24 at approximately
9:05 pm Pacific Standard Time.
This robot craft landed in Meridiani Planum, a
region on Mars that contains exposed deposits of a
mineral -- gray hematite -- that usually forms
under watery conditions. Scientists speculate that the
hematite might have resulted from environmental
conditions indicative of a past lake or active hot
springs, perhaps hospitable to life. The iron oxide
mineral could be the result, however, of hot lava a
situation not conducive to supporting life.
Two out of three missions to the red planet have
failed. One reason there have been so many losses is
that there have been so many attempts. "Mars is a
favorite target," says Dr. Firouz Naderi, manager
of the Mars Program Office at the Jet Propulsion
Laboratory.
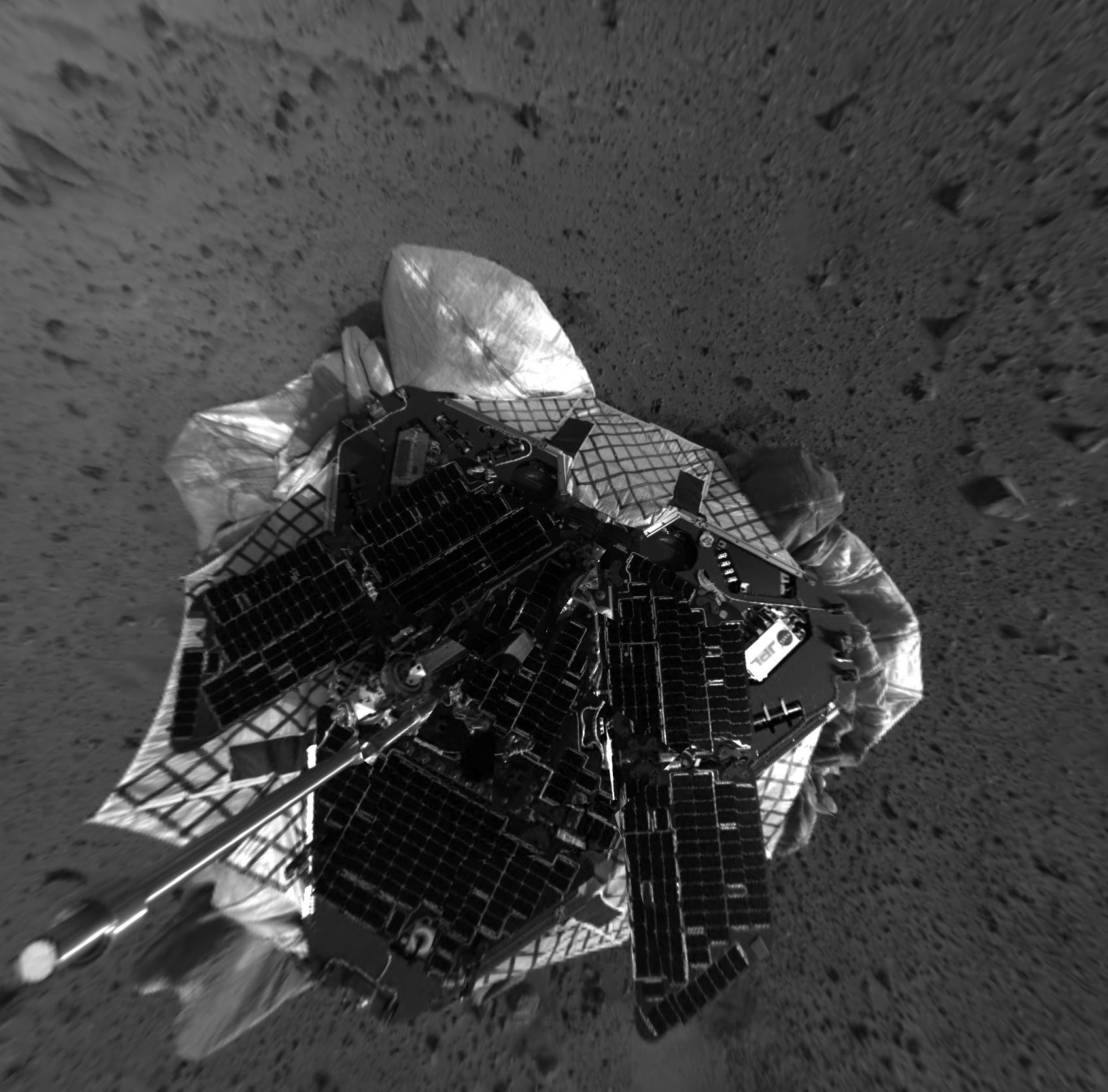
Surface Operations began once the rover completed its
egress.
The rover was designed to last for 90 days of surface
operations.
Surface operations includes two highly interconnected
efforts:
Engineers responsible for rover navigation and
science team members must work closely together to
achieve mission goals. What the rover will actually do
on the surface will depend on complex calculations from
the science team on which rock, soil, and other targets
are high-priority and then intense discussion with the
engineering team on whether the rover can actually move
toward those targets safely and quickly.
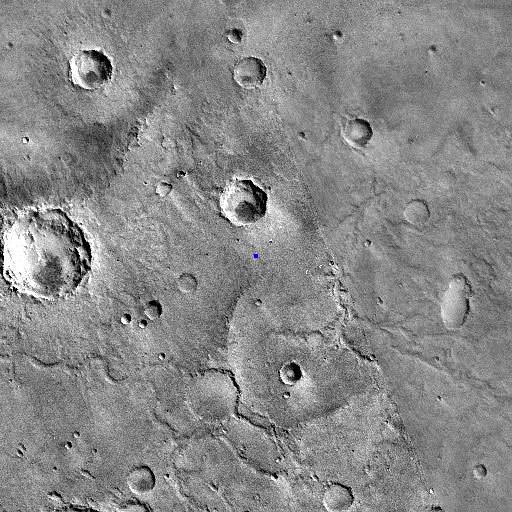
How
Did Navigators Hit Their Precise Landing Target on Mars?
New overhead view below:
The landing site overhead view: